Es sind mehrere aufeinander aufbauende Experimente geplant:
- grundlegende Ultraschall-Erfahrungssammlung mit Raspberry
- Entfernungsmesser, Füllstandsmesser, Eisstärkemesser
- Ultraschall-Empfänger-Fledermaus-Detektor
- Insekten-Zähler
- .grundlegende Ultraschall-Erfahrungssammlung mit Arduino
Zielsetzung 1: grundlegende Ultraschall-Erfahrungssammlung
(hier mit RaspberryPi)
Zunächst soll der Sensor mit dem Mikrocomputer verbunden werden und über die Software sollen
Signale ausgesendet und empfangen werden. Dies geht am besten mit dem Ziel, eine Reflexion des ausgesendeten Ultraschallsignals mit einem Oszilloskop und dem Mikrocomputer zu messen.
Sender-Parameter: Frequenz des auszusenden Signals, Amplitude des Sende-Signals,
Kontrolle über Oszillograph (und evt. Multimeter)
1. Experiment um Grundlagen zu erwerben:
Entfernungen mit dem Ultraschallsensor messen
Nun werden wir lernen, wie wir den Ultraschallsensor verwenden um
Entfernungen zu messen und auf dem Joy-Pi Bildschirm auszugeben.
Autos verwenden übrigens die gleiche Methode um Abstände zu messen.
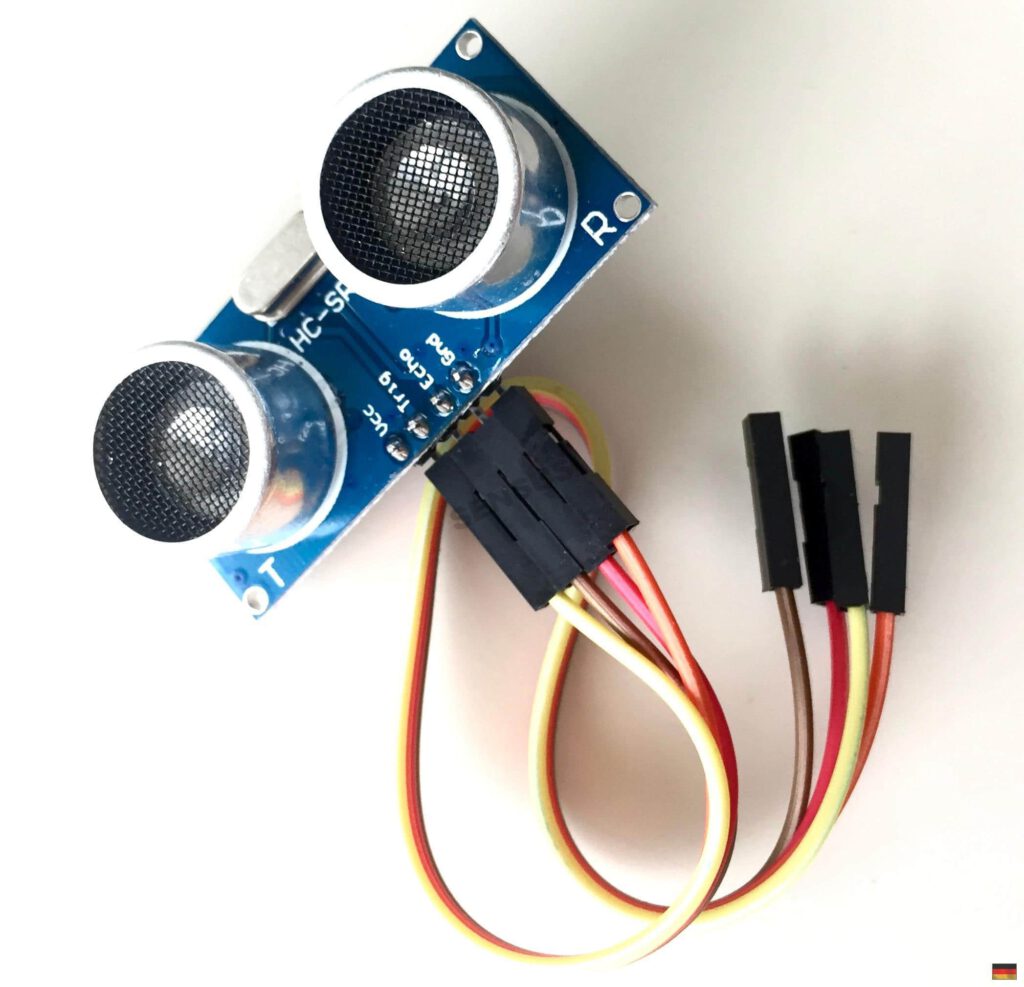
Der Abstandssensor arbeitet mit GPIO.INPUT. Der
Sensor benötigt ein gewisses Intervall um in der Lage zu sein, die
Entfernung auf genaue Art und Weise zu erfassen. Er sendet ein
Ultraschallsignal und empfängt mit einem eingebauten Sensor das Echo,
das von einem Hindernis zurückgeworfen wird. Aus dem zeitlichen
Abstand zwischen dem Senden des Signals und dem Empfangen des
Echos, wird die Distanz berechnet.
Hier eine Version der Software /Einweisungen folgen an getrennter Stelle
!/usr/bin/python
–– coding: utf-8 ––
Author : www.modmypi.com
Link: https://www.modmypi.com/blog/hc-sr04-ultrasonic-range-sensor-on-the-raspberry-pi
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BOARD) # Setze die GPIO Boardkonfiguration ein.
TRIG = 36 # Variablendeklaration
ECHO = 32 # Variablendeklaration
print („Entfernung wird ermittelt.“) # Ausgabe von Text in der Konsole
GPIO.setup(TRIG,GPIO.OUT) # Variable TRIG als Output festlegen.
GPIO.setup(ECHO,GPIO.IN) # Variable ECHO als Input festlegen.
GPIO.output(TRIG, False)
print („Warte auf den Sensor.“)
time.sleep(2) # 2 Sekunden Wartezeit.
GPIO.output(TRIG, True) # Sendet ein Ultraschallsignal
time.sleep(0.00001) # Wartet 0,00001 Sekunden
GPIO.output(TRIG, False) # Beendet das senden des Ultraschallsignals
while GPIO.input(ECHO)==0:
pulse_start = time.time()
while GPIO.input(ECHO)==1:
pulse_duration = pulse_end – pulse_start # Berechnung für die Dauer Des Pulses
distance = pulse_duration * 17150 # Berechnung zur Bestimmung der Entfernung.
distance = round(distance, 2) # Ergebnis wird auf 2 Nachkommastellen gerundet.
print („Distance:“,distance,“cm“) # Konsolenausgabe der Distanz in cm.
GPIO.cleanup() # Gibt GPIO Ports wieder frei.
Führen Sie die folgenden Befehle aus und versuchen Sie es selbst:
cd /home/pi/Desktop/Joy-Pi
sudo python3 distance.py